Project Background
The client had already automated its production lines, but material handling was still completed manually. To further improve efficiency and reduce repetitive labor, the client wanted to replace these manual transport tasks with AGVs, allowing workers to focus on more technical responsibilities such as equipment maintenance, system monitoring, and process adjustment.
Solutions
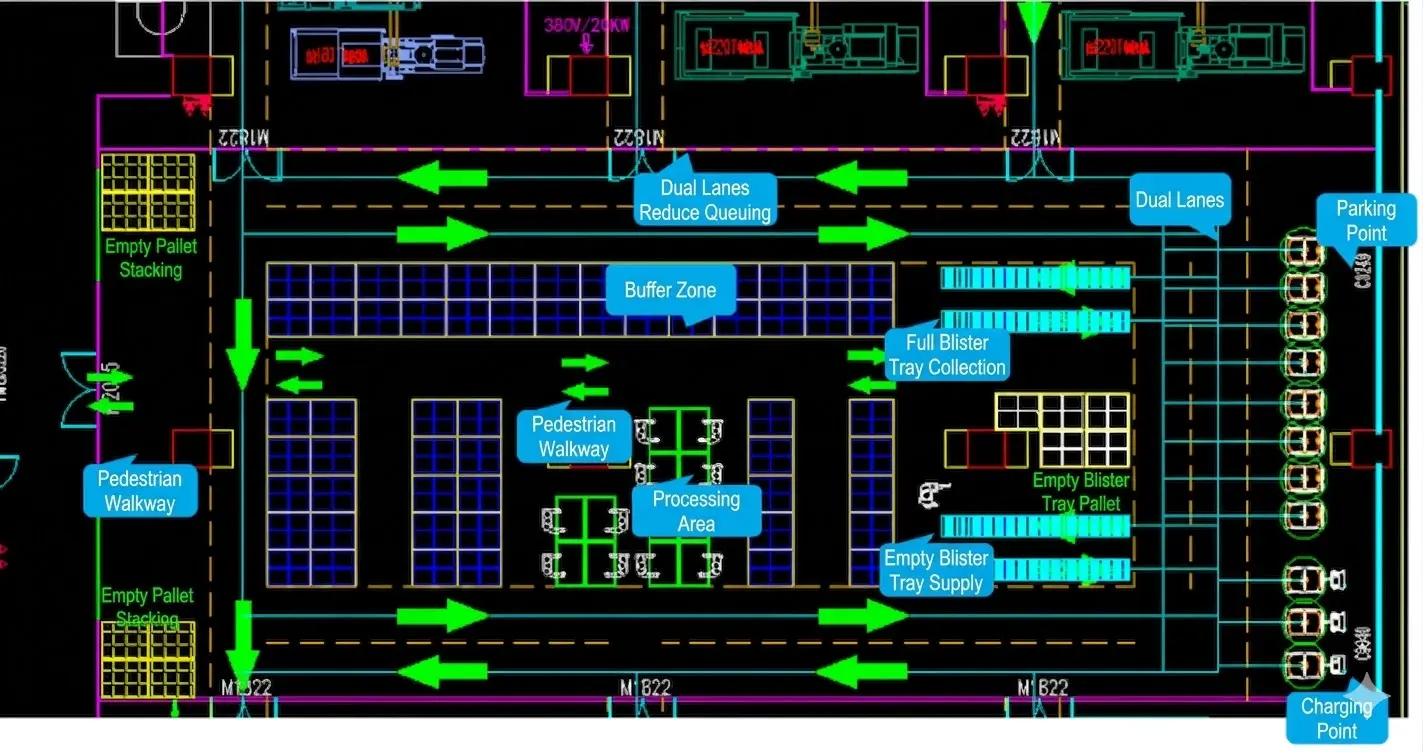
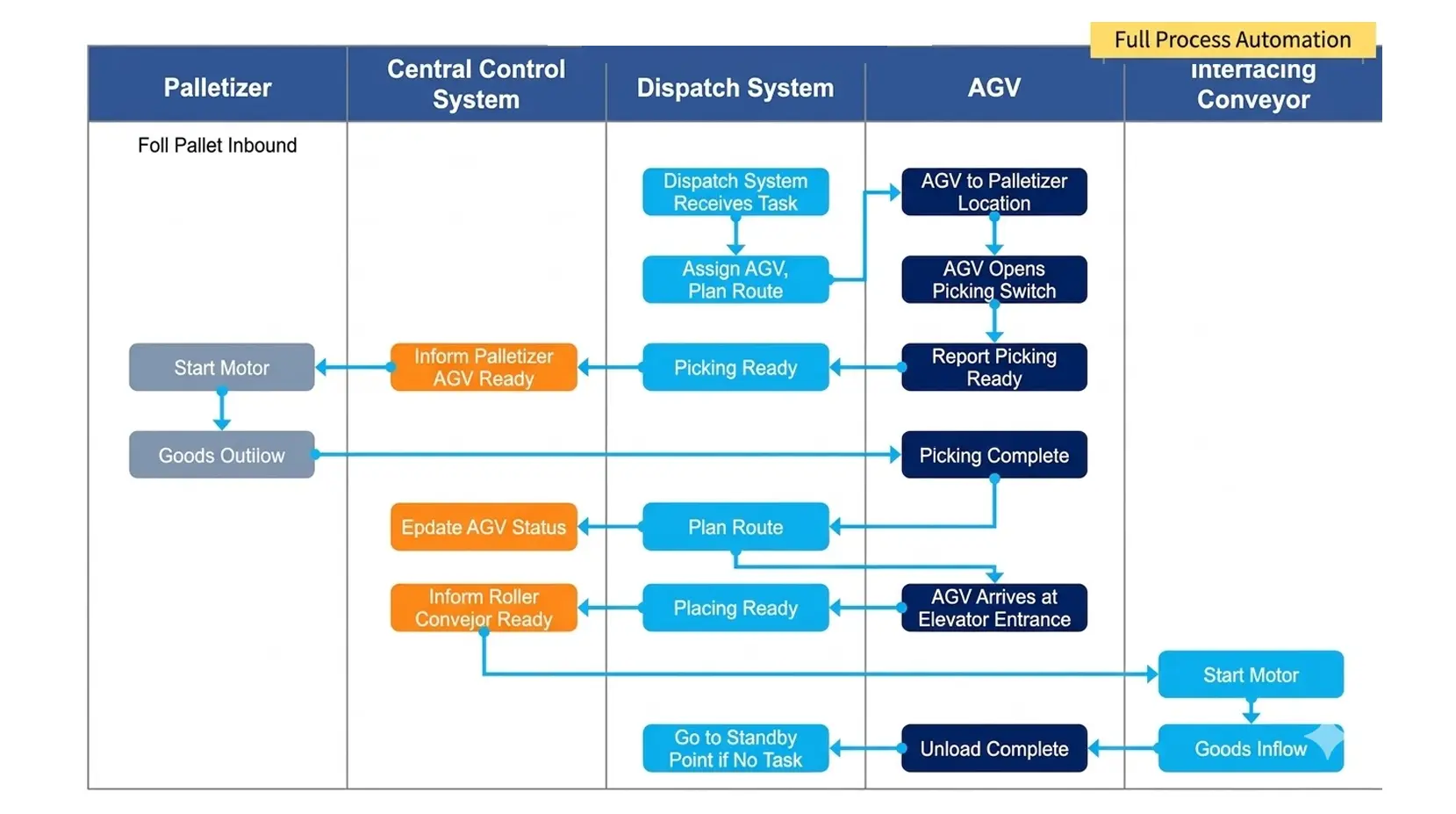
Pickup and Drop off Workflow Design
Empty Blister Tray Delivery Workflow
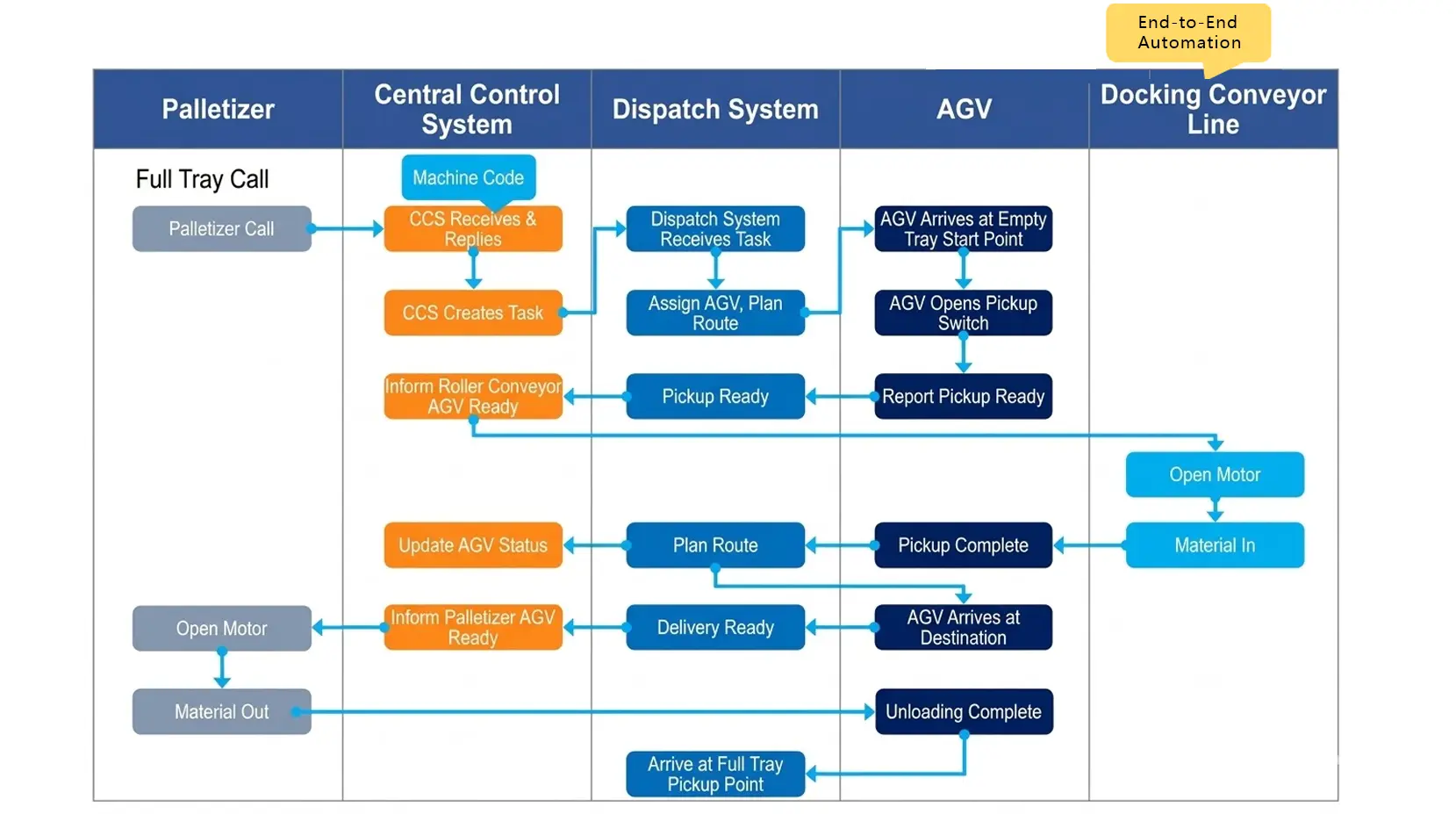
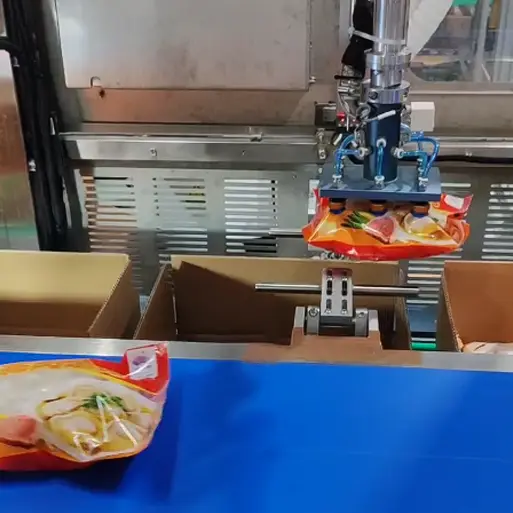
Full Load Pickup Workflow
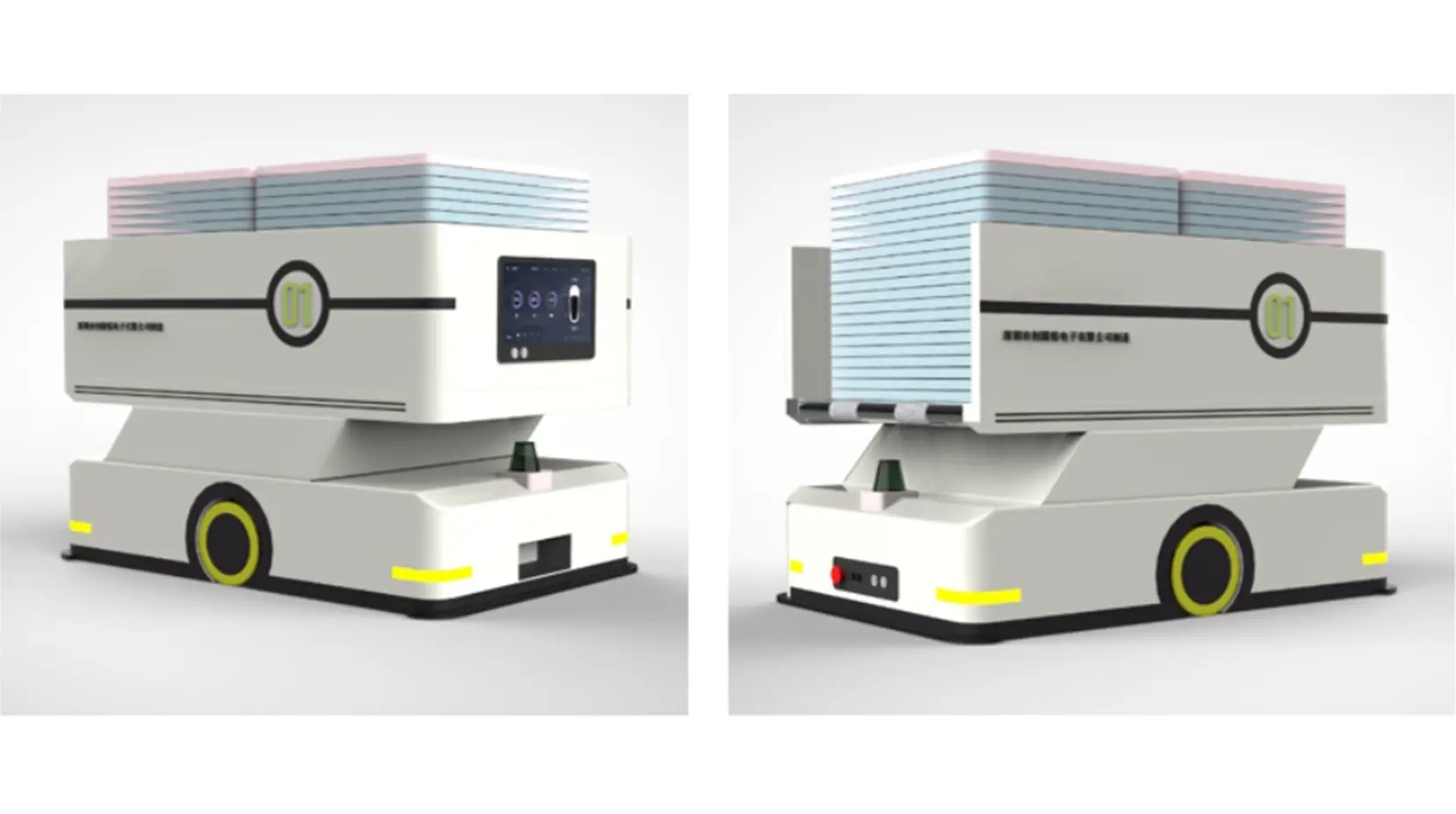
AGV Type Selection
| Technical Parameters | Description |
| Chassis Brand | XianGong |
| Structural and Electrical Design | Chuangjingrui |
| Overall Industrial Design | Chuangjingrui |
| AGV Dimensions | 1000 (L) × 700 (W) × 828 (H) mm |
| Navigation Method | Laser SLAM Navigation |
| Drive Type | Dual Wheel Differential Drive |
| Max Payload | 150 kg |
| Continuous Runtime | > 8 h |
| Max Speed | 1.5 m/s |
| Repeat Positioning Accuracy | ±10 mm, ±0.5° |
| Charging Method | Manual / Automatic |
| Power Supply | 48V / 24Ah (LiFePO4) |
| Communication Method | WiFi (2.4G / 5G Dual Band) |
| Traversability | Slope < 5%, Step Height < 5 mm, Gap < 30 mm |
| Color | Customizable |
AGV Quantity Calculation
| Area | Hourly Output | AGV Workflow | Total Cycle Time (min/trip) |
Production Takt (min/trip) |
AGV Quantity | Actual AGV Quantity |
| A-1 Lane | 14 | Parking Point → Empty Blister Tray Conveyor → Tray Loader Infeed → Tray Loader Outfeed → Full Blister Tray Conveyor Line → Parking Point | 7.51 | 8.57 | 1.47 | 9 |
| A-2 Lane | 14 | Parking Point → Empty Blister Tray Conveyor → Tray Loader Infeed → Tray Loader Outfeed → Full Blister Tray Conveyor Line → Parking Point | 6.97 | 8.57 | 1.37 | |
| A-3 Lane | 14 | Parking Point → Empty Blister Tray Conveyor → Tray Loader Infeed → Tray Loader Outfeed → Full Blister Tray Conveyor Line → Parking Point | 7.13 | 8.57 | 1.40 | |
| B-1 Lane | 14 | Parking Point → Empty Blister Tray Conveyor → Tray Loader Infeed → Tray Loader Outfeed → Full Blister Tray Conveyor Line → Parking Point | 7.51 | 8.57 | 1.47 | |
| B-2 Lane | 14 | Parking Point → Empty Blister Tray Conveyor → Tray Loader Infeed → Tray Loader Outfeed → Full Blister Tray Conveyor Line → Parking Point | 6.97 | 8.57 | 1.37 | |
| B-3 Lane | 14 | Parking Point → Empty Blister Tray Conveyor → Tray Loader Infeed → Tray Loader Outfeed → Full Blister Tray Conveyor Line → Parking Point | 6.97 | 8.57 | 1.37 |
Note: A combined operation means the AGV completes one trip by delivering one full blister tray load and returning with one empty blister tray bin. In this project, all quantity calculations are based on one full load bin and one empty bin per trip. Based on this model, the required quantity is 9 roller type AGVs. To handle peak flow more reliably, we recommend purchasing 11 AGVs.
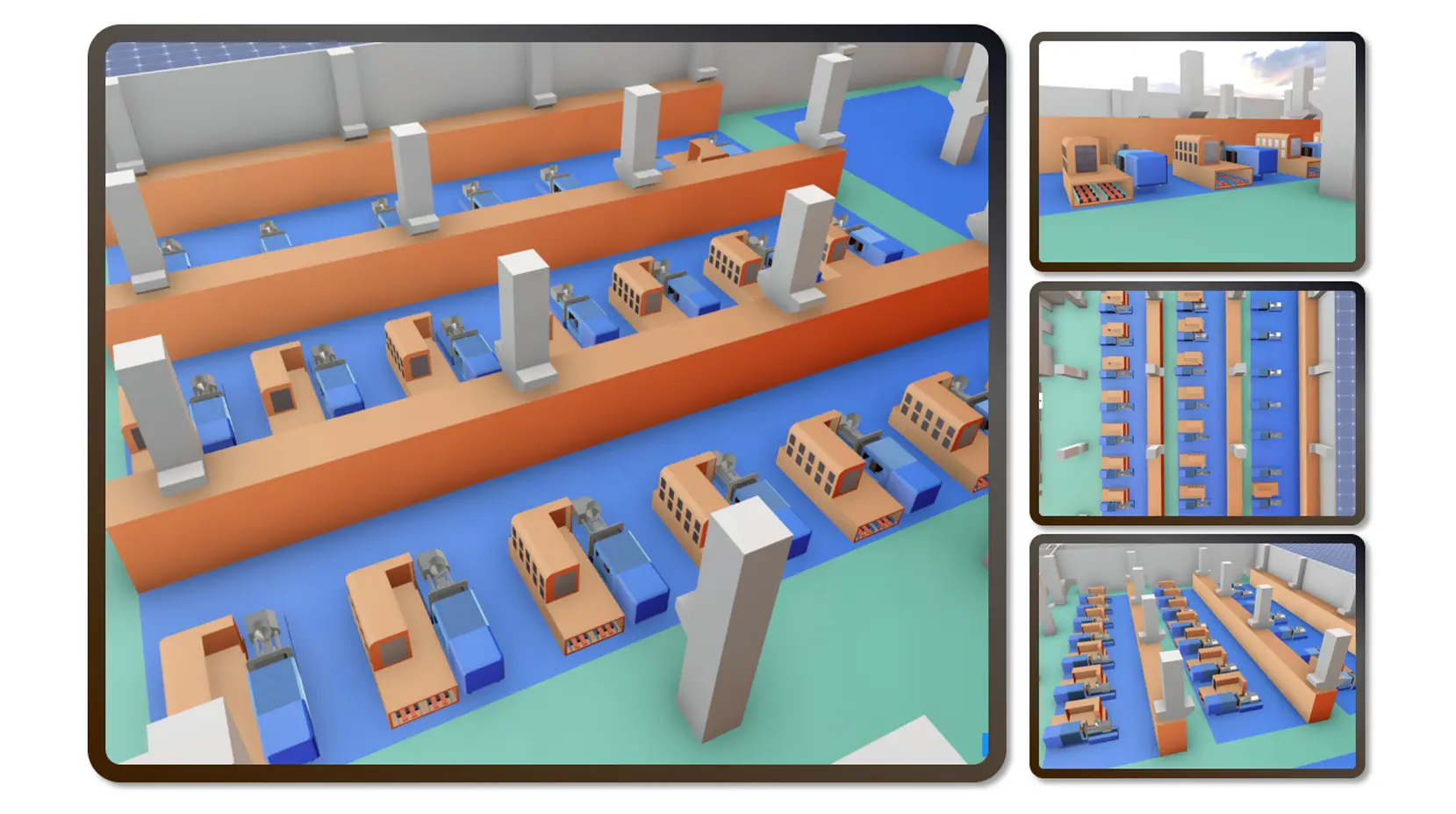
Digital Twin Scene Configuration
The display below presents a digital twin scene built for the project site. Users can configure the scene themselves according to actual application needs, without writing any code.
Standard Features
Optional Features
Project ROI Analysis
ROI Analysis
The value of this project comes from reducing manual transport, improving delivery efficiency, and creating a more stable and intelligent material handling process. In addition to labor savings, the AGV system also improves factory image and supports future smart manufacturing upgrades.
Estimated Payback Period: 2 Years

Interested in our solutions?
- Contact our experts to learn more about Robotlyne’s warehouse solutions.
- See if your project is feasible fast. Get a clear scope, timeline, and Free ROI Analysis.